在距離地球平均 2.25 億公里的紅土地上,一場無聲的科技革命剛剛完成了它的首次路試。NASA 的毅力號(Perseverance)探測器,這台在火星執行任務的六輪機器科學家,成功完成了首次完全由人工智慧(AI)規劃的駕駛任務。這項由噴射推進實驗室(JPL)主導的實驗,標誌著人類探索地外行星的方式進入了「自動駕駛」的新紀元。過去,火星車的每一寸移動都需依賴地球端的工程師精準計算,而現在,這份責任正逐漸移交給能夠理解視覺影像與語言邏輯的生成式 AI 模型。
在火星上開車從來不是一件容易的事。由於地球與火星之間的通訊延遲極其嚴重,信號往返往往需要數十分鐘,這使得科學家無法像玩賽車遊戲一樣即時透過搖桿控制火星車。在過去的 28 年裡,導航任務是由人類「路徑規劃員」分析地形影像,小心翼翼地標註路徑點(Waypoints)。為了避開致命的沙坑、尖銳的岩石或陡坡,這些路徑點通常間隔不到 100 公尺。然而,隨著探索範圍的擴大,這種高度依賴人力的方式已成為效率的瓶頸。為了解決這個問題,NASA 與 Anthropic 公司合作,導入了 Claude 生成式視覺語言模型,讓 AI 學習像人類專家一樣「閱讀」地形。
| 比較項目 | 傳統人類規劃方式 | 生成式 AI 規劃方式 |
|---|---|---|
| 地形分析 | 由地面工程師手動標記危險區域 | AI 自動識別基岩、沙丘與巨石陣 |
| 規劃時間 | 需數小時甚至數天進行多方會議 | 由模型快速生成連續路徑與多個航點 |
| 導航距離 | 通常單次短距離移動以保安全 | 可實現公里級長距離自主巡航潛力 |
| 驗證機制 | 人工模擬與同儕審核 | 數位分身自動驗證 50 萬項遙測變數 |
在 2025 年 12 月的這次指標性測試中,AI 模型分析了來自火星勘測軌道衛星(MRO)的高解析度影像與地形高度數據。它不僅識別出了地表的危險特徵,還精確地在任務的「第 1707 與 1709 個火星日」分別規劃了長達 210 公尺與 246 公尺的行駛路線。為了確保安全,JPL 的工程師在將命令傳送至火星前,先在地球上的「數位分身」(火星車虛擬複製品)中跑了超過 50 萬次變數驗證。這種結合生成式 AI 的創造力與數位分身的嚴謹性的做法,大幅降低了人為疏失的可能性,也讓火星車能應對更為複雜的未知地形。
這項技術的成功,不僅是為了讓毅力號跑得更快,更是為了未來的深空探索奠定基礎。NASA 署長賈里德·艾薩克曼指出,隨著人類將目標轉向月球甚至更遙遠的星球,通訊延遲將變得更加巨大。未來的探測器、無人機甚至月球基地系統,都將搭載這種具備「邊緣計算」能力的 AI 系統。它們將繼承無數工程師與航太員的集體智慧,在沒有地球支援的情況下自主做出決策。當 AI 能夠像專家一樣感知環境、定位座標並執行路徑時,人類離在另一個星球上建立永久棲息地的夢想,又更近了一大步。
▲ 這段動畫是利用毅力號(Perseverance)於 2025 年 12 月 10 日在耶澤羅撞擊坑(Jezero Crater)邊緣行駛時所取得的數據製作而成。淺藍色線條描繪了探測車車輪行經的軌跡;從探測車前方蜿蜒伸出的黑色線條,則顯示了它正在考慮的路徑選項。白色地形是根據探測車數據生成的高度圖(height map)。在動畫接近尾聲時出現的藍色圓圈,則是一個航點(waypoint)。(提供:NASA/JPL-Caltech)
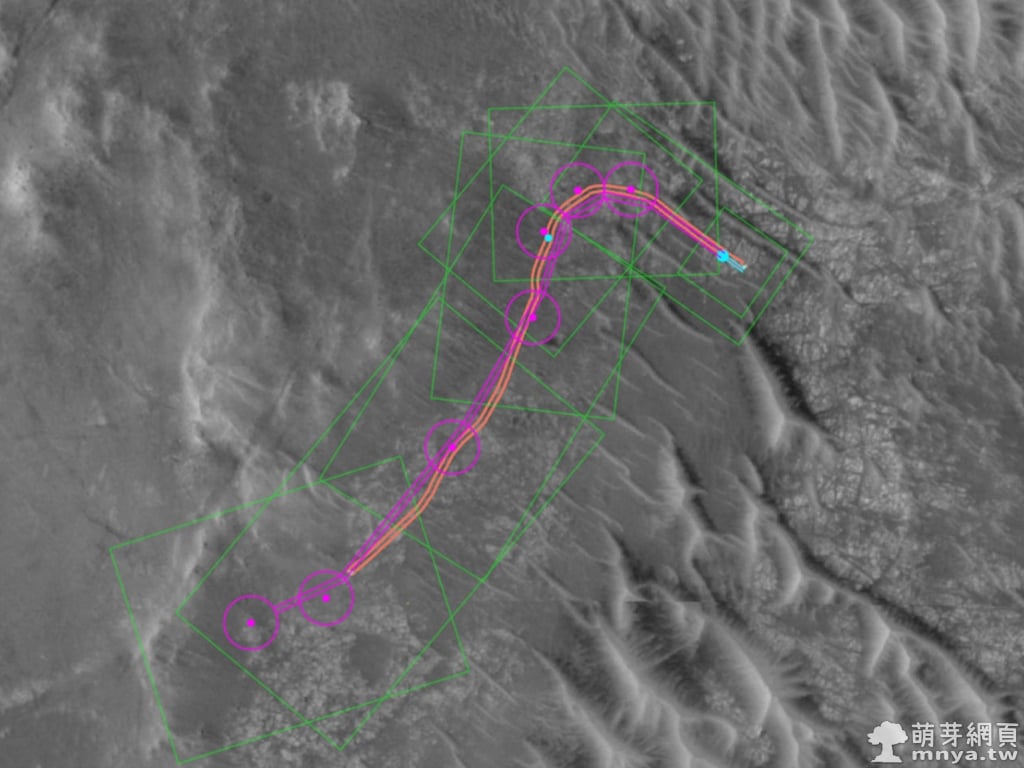
▲ 這張標註過的軌道影像顯示了「毅力號」(Perseverance)火星車於 2025 年 12 月 10 日在耶澤羅撞擊坑(Jezero Crater)行駛期間,由 AI 規劃(以洋紅色表示)與實際行走(橘色表示)的路線。這次行駛是兩次技術演示中的第二次,旨在展示生成式人工智慧(Generative AI)可以被整合應用於火星車的路線規劃中。(圖片來源:NASA/JPL-Caltech/UofA)

✎ 參考資料 · References






 《上一篇》20260130 NGC 7722 的塵埃之舞
《上一篇》20260130 NGC 7722 的塵埃之舞  《下一篇》20260210蛋星雲(The Egg Nebula)
《下一篇》20260210蛋星雲(The Egg Nebula) 









留言區 / Comments
萌芽論壇